
Ajankohtaista
Onko Suomi jäämässä jälkeen robotisaation hyödyntämisessä?
Yksi yritysten keskeisistä puheenaiheista on osaavan työvoiman saatavuus nyt ja erityisesti tulevaisuudessa. Haaste on useiden maiden kanssa yhteinen. Sen vuoksi robotisaatiosta on tullut yksi tärkeistä investointikohteista maailmalla.
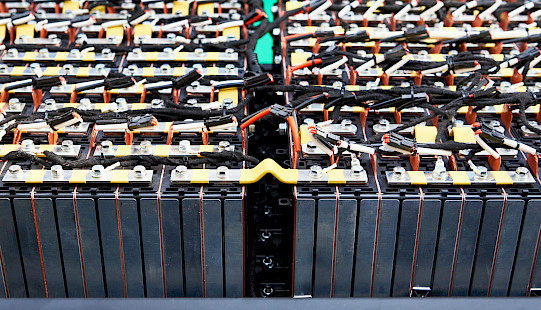
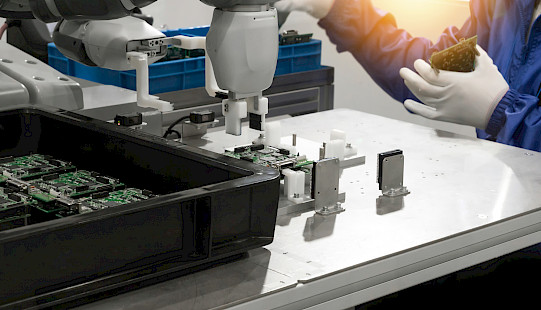
Käytetyt sähköautojen akut materiaaliksi ja energiavarastoiksi
Kiertotalous vaatii uudenlaisia automaatioratkaisuja käytöstä poistettujen tuotteiden purkamiseen ja lajitteluun niiden elinkaaren loppuvaiheessa. Useissa tuotteissa energiavarastona oleva akusto sisältää arvokkaita materiaaleja, jotka voidaan uusiokäyttää, vaikka tuote muuten olisi muuten käyttökelvoton.

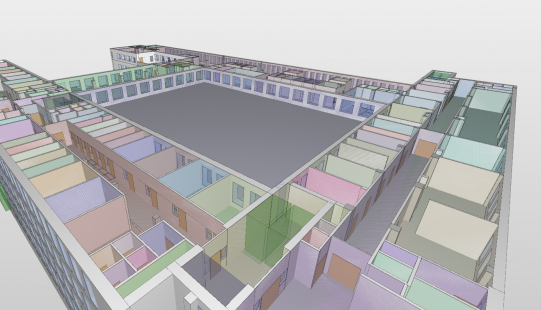
NIS2 kilpailukyvyn varmistajana
Helmikuussa viisi saman yhtiön akkutehdasta joutui laajamittaisen kyberhyökkäyksen kohteeksi Saksassa, Indonesiassa ja Romaniassa. Hyökkäys aiheutti merkittäviä tuotantokatkoksia ja pitkällisiä jälkiselvittelyjä. Tuotantoympäristön kyberhyökkäyksien, kuten kiristysohjelmien ja tietojenkalastelun, määrä on kasvussa ja aiheuttavat huomattavan riskin yrityksille. IBM on raportoinut, että jo yksi tietovuoto maksaa yritykselle noin 4,35 miljoonaa dollaria.

Tulevaisuuden tekijä Jukka-Pekka Nikko
J-P Nikko valmistui datanomiksi ammattikoulusta ja armeijan jälkeen siirtyi työelämään jakeluautonkuljettajaksi. Tätä hommaa tehdessä valkeni, että elämässä eteenpäin pääsemiseksi täytyy lähteä opiskelemaan. J-P:lle automaatiotekniikka oli mielenkiintoisin aihe mitä tuli vastaan.
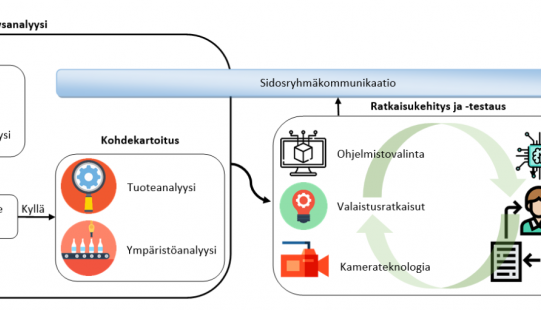
Konenäköyhteistyötä teollisuusyritysten ja Seinäjoen ammattikorkeakoulun välillä
Konenäköteknologiaa ja automaattisen laadunhallinnan kehitysmahdollisuuksia tehtiin tutuksi eteläpohjalaisille valmistavan teollisuuden yrityksille aktiivisella pilotoinnilla ja teknologiademoilla. Pilotoinnissa käytettiin varta vasten siihen kehitettyä yhteistyömallia.

Vallankumous kolmessa aallossa
Vuosi 2023 merkitsi siirtymistä analyyttisen tekoälyn ajasta generatiivisen tekoälyn aikaan. ChatGPT katalysoi tekoälyn uuden aallon, joka perustuu laajoihin kielimalleihin. Nämä tekoäly mallit tuottavat tekstiä, kuvia, musiikkia, liikkuvaa kuvaa ja jopa 3D-malleja tavalla, jonka ei aiemmin uskottu olevan mahdollista koneille. Ja tämä taas mahdollistaa uusia tuotteita ja palveluita, joita on vaikea kuvitella etukäteen. Siksi nimitys tekoälyn vallankumous on paikallaan.





Podcast: Tekoälyä meille kaikille Osa 3
Tekoälyn käyttöönotto on perinteisiin ohjelmistoihin verrattuna erilaista. Näin siksi, että teknisesti tekoälyä voidaan kehittää ja ylläpitää datan avulla, eikä päivityksiä varten enää tarvitse työllistää ohjelmoijaa. Sen sijaan voidaan soveltaa koneoppimista suoraan käyttöympäristössä. Toki siinä tarvitaan asiantuntemusta ja huolellisuutta, ettei käytetä huonolaatuista dataa tai että sensitiivinen data vaarantuu.

