Konenäköyhteistyötä teollisuusyritysten ja Seinäjoen ammattikorkeakoulun välillä
Konenäköteknologiaa ja automaattisen laadunhallinnan kehitysmahdollisuuksia tehtiin tutuksi eteläpohjalaisille valmistavan teollisuuden yrityksille aktiivisella pilotoinnilla ja teknologiademoilla. Pilotoinnissa käytettiin varta vasten siihen kehitettyä yhteistyömallia.
- Kirjoittaja:
- Juha Hirvonen, SeAmk
- Kirjoittaja:
- Toni Luomanmäki, SeAmk
- Kuvat:
- SEAMK
- Julkaistu:
Vuonna 2019 Seinäjoen ammattikorkeakoulun toteuttamassa koulutustarvekyselyssä yli puolet vastanneista 23:sta valmistavan teollisuuden yrityksestä halusi koulutusta konenäöstä. Muussakin yhteistyössä on noussut esiin kasvava kiinnostus konenäköön, etenkin siihen perustuvaan automaattiseen laadunvalvontaan. Valmistavan teollisuuden pk-yrityksissä laadulla onkin suuri merkitys, ja laatuongelmat heijastuvat yleensä koko toimitusketjuun. Laadunvalvonnalla on lisäksi keskeinen merkitys hukan ja jätteen syntymiseen.
Huutoon piti vastata. Seinäjoen ammattikorkeakoulun vuosina 2020–2023 toteuttamassa Laadusta kilpailukykyä konenäöllä -hankkeessa kehitettiin malli konenäköpilottien tekoon valmistavan teollisuuden yritysten ja ammattikorkeakoulun välillä. Mallia käyttämällä hankkeessa tehtiin konenäköä tutuksi eteläpohjalaisille valmistavan teollisuuden yrityksille erilaisten konenäköpilottien ja -demonstraatioiden avulla.
Viisi pilottia toteutettiin suoraan yrityksistä nousseiden tarpeiden pohjalta käyttämällä yrityksistä saatuja osia tai tuotteita testikappaleina. Lisäksi laadittiin selvitys tekoälypohjaisista konenäköohjelmistoista ja tehtiin viisi demonstraatiota koneoppimisesta muutamalla eri ohjelmistolla hyödyntäen Internetin avoimia kuvatietokantoja. Demonstraatioissa käytettyjen kuvien aiheet valikoitiin teollisuuteen sopiviksi. Uusinta tietoa haettiin Euroopan tasolla alan keskeisimmiltä messuilta Stuttgartista. Vision-messut järjestetään joka toinen vuosi ja ne ovat yhdessä Motek-messujen kanssa erinomainen kokonaisuus erityisesti konenäöstä, mutta myös automaatiosta kiinnostuneille. Hanke sai rahoituksensa Euroopan aluekehitysrahastosta.
Monipuolisia pilotteja teollisuuden tarpeisiin
Ensimmäinen pilotti käsitteli lieriömäisistä metalliosista tehtäviä mittauksia. Osat olivat halkaisijaltaan noin 1,5 cm ja niissä oli reunoissa viisteet. Yritys oli kiinnostunut tietämään kuinka tarkasti sisähalkaisijan ja viisteiden paksuuden vaihtelua pystytään mittaamaan kameran avulla. Mittausrutiini toteutettiin sekä kaupallisella älykameralla että avoimen koodin konenäkökirjastolla. Pilotissa myös havainnollistettiin valotuksen sekä optiikan valinnan merkitystä mittaukseen sekä demonstroitiin ratkaisuita tehokkaaseen kuvadatan keräämiseen ja analyysiin.
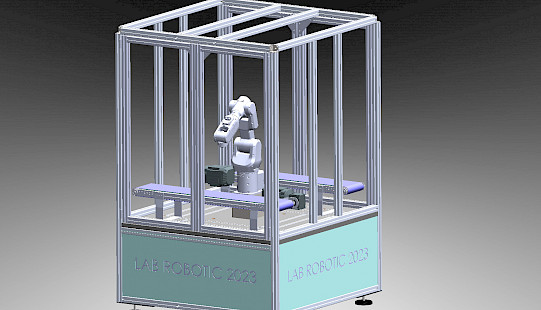
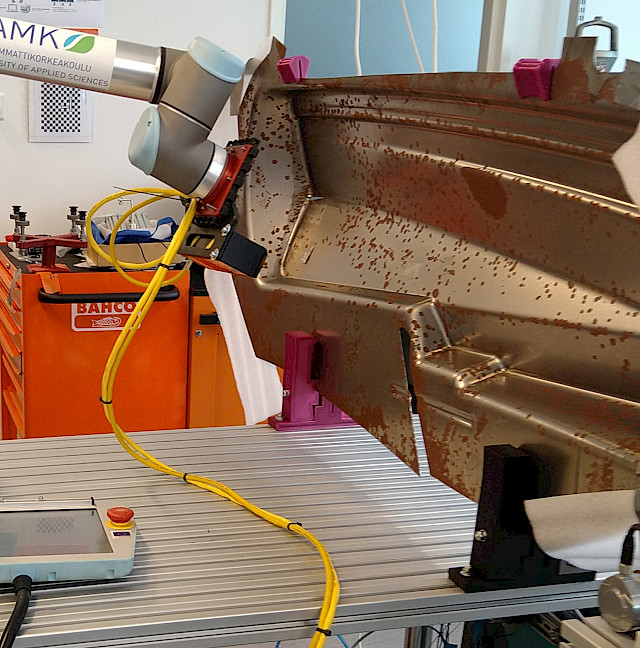
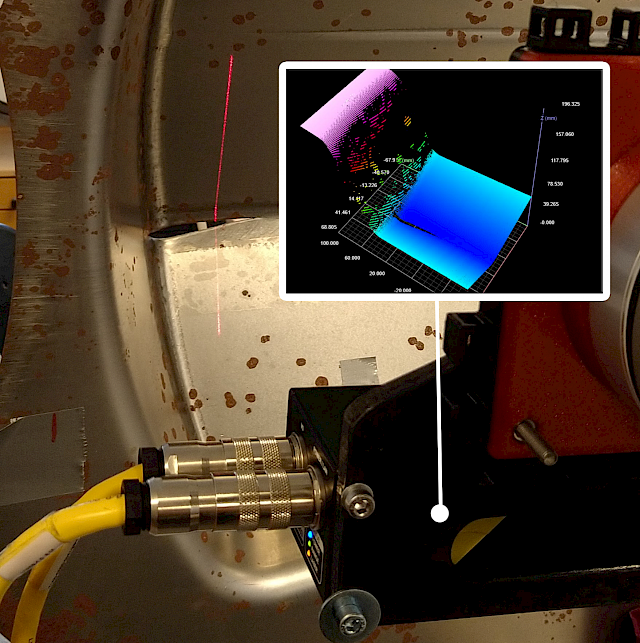
Toisessa pilotissa tarkasteltiin syvävedettyjä ohutlevykappaleita ja etsittiin niistä työstössä syntyneitä repeämiä ja pullistumia. Syväveto on menetelmä, jolla tasomainen metallilevy muovataan kolmiulotteiseen muotoon, usein hieman kuppimaiseksi, käyttämällä erikoisrakenteista puristinta. Tekniikalla valmistetaan esimerkiksi erilaisia koteloiden osia ja konepeittoja. Tutkittavat osat olivatkin suuria, jopa yhdeltä dimensioltaan yli metrin. Kuvantamisessa käytettiin yhteistyörobottia, jonka käsivarteen oli liitetty 3D-laserskanneri. Tämä mahdollisti suuren kuvaamisalan ja suuren mittaustarkkuuden. Robotti ja skanneri kommunikoivat socket-yhteydellä. Repeämän etsinnässä käytetyssä ohjelmakierrossa robotti skannaa kappaleen todennäköiset repeämäkohdat. Jos repeämä löytyy, ohjelma tallentaa robotin asennon repeämän tunnistushetkellä. Robotti osoittaa mittauksen päätyttyä repeämäkohdan käyttäjälle, jotta tämä voi tehdä sille tarkempia tutkimuksia. Pullistuman etsinnässä käytetyssä ohjelmakierrossa etsittiin korkeuseroja kappaleiden tasaiselta alueelta. Sekä repeämät että pullistumat onnistuttiin tunnistamaan luotettavasti.
Kolmas pilotti tehtiin elintarvikealan yritykselle, ja siinä tunnistettiin hihnakuljettimella liikkuvia erilaisia leikkelepaketteja älykameraa käyttämällä. Tunnistus tehtiin piirteiden pohjalta, sillä kaikissa paketeissa ei ollut yksilöivää viivakoodia näkyvillä. Tässäkin pilotissa valaistus oli keskeistä, jottei kiiltävä muovipinta häiritse paikoitusta ja piirteiden analyysia. Oleellista oli myös lyhyt analyysiaika, koska tuotteet voivat liikkuvat kuljettimella hyvin nopealla tahdilla.
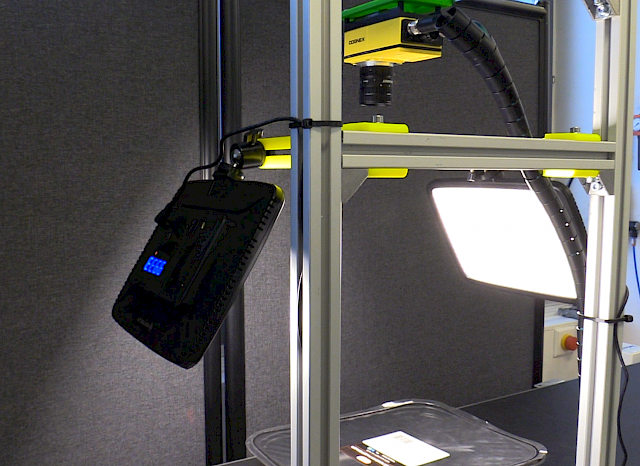
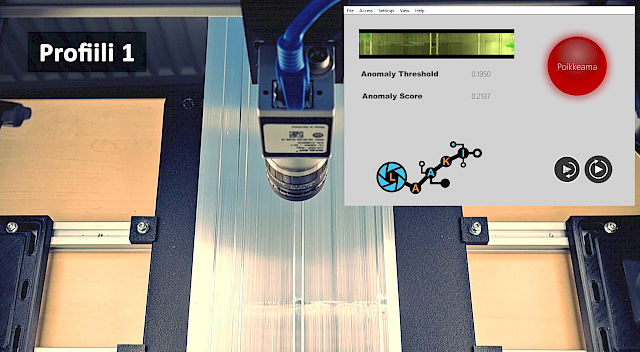
Neljännessä pilotissa tutkittiin alumiiniprofiilin laatupoikkeamien tunnistamista syväoppimismenetelmällä. Pilotissa käytettiin PC-pohjaista konenäköympäristöä ja kaupallista ohjelmistoa. Alumiiniprofiileista etsittiin niiden pursotuksessa tulleita saumaa tai taitetta muistuttavia virheitä sekä naarmuja. Pilotissa kiinnitettiin huomiota lisäksi opetuksen ja mallin toiminnan kannalta tärkeisiin asioihin, kuten valaistukseen ja kuvausolosuhteiden vakioimiseen, sekä sopivan testiympäristön ja selkeän käyttöliittymän rakentamiseen. Pilotissa havaittiin erityyppisten poikkeamien tunnistamisen olevan mahdollista, kunhan kuvausolosuhteet saatiin vakioitua.
Viides pilotti käsitteli erilaisten metalliosien tunnistettavuutta 3D-kameralla ja edelleen poimittavuutta robotilla ja magneettitarttujalla. Koneenpalvelussa yksi yleinen haaste on satunnaisessa järjestyksessä esimerkiksi kauluslavalla olevat kappaleet, jotka tulisi poimia automaattisesti robotilla ilman kappaleiden erillistä asettelua. Tähän haasteeseen soveltuvat hyvin 3D-kamerat, koska niillä saadaan poimittavien kappaleiden paikka ja orientaatio selville 3D-avaruudessa. Pilotti tehtiin opinnäytetyönä metallialan yritykseen ja siinä sovellettiin kaupallista bin picking -3D-kameraa ja yhteistyörobottia. Osa poimittavista osista oli levymäisiä ja osa sylinterimäisiä ja niiden pinnan heijastavuus vaihteli, mikä toi haastetta kuvaamiseen. Osien tunnistusta kokeiltiin sekä niistä otettujen kuvien että niistä luotujen CAD-mallien perusteella, jotta kuhunkin löydettiin toimivin tapa.
Päätuloksena malli konenäköpilottien tekemiseen
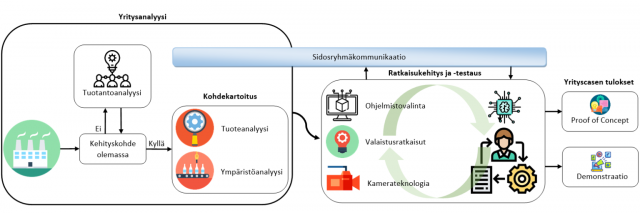
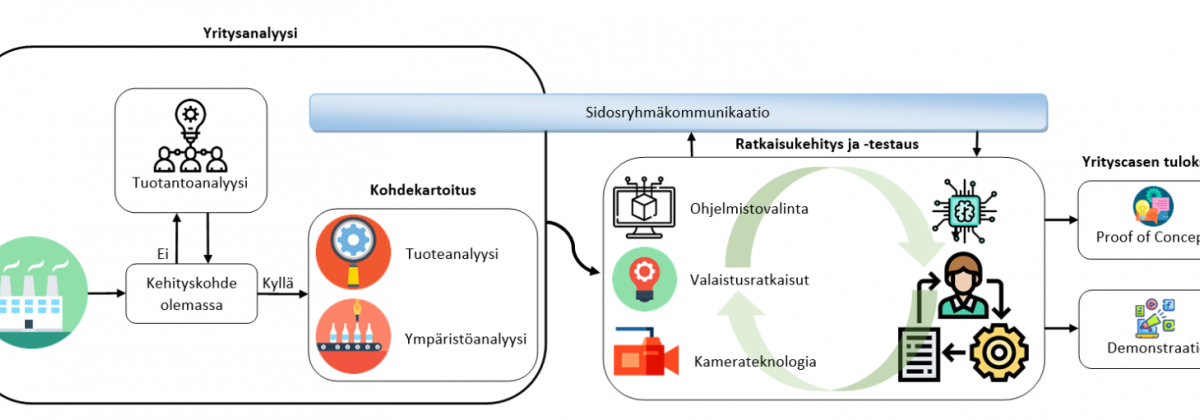
Hankkeen päätavoite oli kehittää tehokas malli konenäköpilottien tekoon teollisuusyritysten ja ammattikorkeakoulun välille. Malli vastaa siihen, miten konenäön soveltamista laadunvalvonnan näkökulmasta kannattaa lähteä arvioimaan ja kehittämään. Ensin kartoitetaan yrityksen tarpeet ja analysoidaan tuotantoa mahdollisten laadunvalvonnan automatisointikohteiden varalta. Tässä vaiheessa mietitään myös konenäköratkaisun toteutuskelpoisuutta materiaalivirran, tilantarpeen ja valaistuksen näkökulmasta. Seuraavaksi ruvetaan hakemaan toimivaa teknologista ratkaisua yhdessä yhteistyökumppanin kanssa. Seinäjoen ammattikorkeakoulu tarjoaa tätä joko maksullisena palvelutoimintana tai opiskelijatyönä projektin tai opinnäytetyön muodossa. Kehitetyt pilotit eivät ole tuotantovalmiita, mutta niistä toimitetaan yritykselle tarvittavat materiaalit, joiden avulla lopullinen ratkaisu voidaan toteuttaa jouhevasti kaupallisen toimijan kanssa. Myös yrityksen ymmärrys konenäköteknologiasta kasvaa.
Mallia sovellettiin hankkeen piloteissa ja sen toimivuus todettiin hyväksi. Malli tarjoaa hyvän yhteistyörajapinnan alueen yritysten ja ammattikorkeakoulun välille ja sitä tullaan soveltamaan myös jatkossa.
Lisätietoa